<iframe width="854" height="480" src="https://www.youtube.com/embed/EwrQEsFmL4E" frameborder="0" allow="autoplay; encrypted-media" allowfullscreen></iframe>
<iframe width="854" height="480" src="https://www.youtube.com/embed/j4OmVLc_oDw" frameborder="0" allow="autoplay; encrypted-media" allowfullscreen></iframe>
Uydunun denge olayı çözülmüş görünüyor. Şu bir kaç önemli kısım kaldı...
1 - Kumandayla Televizyon açılınca uyduya enerji vermek ve kapatmak (Stepmotorlar aküleri bitirmemesi için)
2 - Enerji verildiğinde GPS ve PUSULA yardımıyla dünyadaki konumumuz ve istediğimiz uyduyu konumlandırma.
3 - Uydular Dünyadaki konumumuza göre hangi açıyla pozisyon almalı algoritmasının çıkarılması
4- Sinyali takip eden ayrı işlemcinin programlanması. (Daha hızlı ve kararlı çalışması için)
Ben yinede malzeme azaltmak bakımından ve teknedeki büyük salınımları azaltmak için tüm mekanizmanın altına bir ağırlık bağlayıp hacıyatmaz taktiğinin kullanılması taraftarıyım.
Çanağı fiber yaparsak ağırlık ne ölçüde değişir? LNB'nin Dışındaki demir veya plastik korumalar çıkarılabilir.
İyi çalışmalar.
Tv deki IR alicinin hemen yanina bir IR alici daha koyulup ac kapa komutlari takip edilebilir. Tv nin usb portu varsa, muhtemelen kapali iken port enerjisi kesiliyordur. bu porta bir minik devre baglanip porta enerji gelince bir role ile antenin enerjisi acilabilir.
O konulara cok hakim degilim. ancak hali hazirda teknede illa bir gps cihazi vardir. bu cihazlar hali hazirda belli formatlarda konum bilgisini sagliyor olmali ( NMEA miydi oyle bir protokol vardi. ) O sebepten ayri gps unitesi montajina cok derek oldugunu dusunmuyorum. Yine de gerekirse gps modulleri cok karmasik degil diye biliyorum. Hic gps kullanmamis bir arduinocu yu 1 gunden fazla ugrastirmaz. Pusula sensoru muhtemelen imu sensorune entegre olacaktir. O yuzden o konu zaten platformu yaparken cozulecek birsey.
Uydu konumlari ile ilgili bilgim sifir

. tekbildigim canagin belli bir aciyla yukari dogru bakmasi gerektigi. Pek televizyon da izlemeyen biri olarak fazla iddialiyim bu projede
... Ilerde teknemde bir tane uydu anteni isteme sebebim, bir gun gelir de teknemi yaparsam gunlerce belki birkac hafta insan yuzu gormeden denizde gecirecegim gunler olsun istiyorum. Eh, dunyadan da haber almak lazim... O sebepten. En beles iletisim araci, tek yonlu de olsa.
Bu projeye bu uydu / canak konularindan anlayan birini dahil etmek lazim
.
( Valla siz PIC ile filan gelistirebilirsiniz. ben arduino diye bahsetmek istiyorum cunku kolayima geliyor
)
Bana gore gerekli MCU listesi soyle :
Platform icin :
1 - Sinyal yorumlama ve IMU okuyup stabil platformun stabilligi icin gerekli acilari hesaplama arduinosu
2 - Motor kontrol arduinosu
Sinyal yorumlamanin cok islem yuku alacagini sanmiyorum. su sekilde bir devre buldum internette :
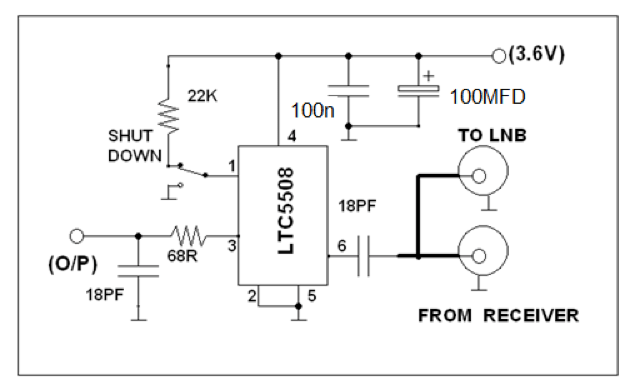
Cikis ucundan alinan voltaj ne kadar kuvvetli ise uydu sinyali de o kadar kuvvetli oluyormus.
Bu durumda basitce bu ucu IMU Arduinosunun bir analog ucuna bagladik mi, sinyal gucu de elimizin altinda olur.
IMU Arduinosu Imu sensorunden aldigi aci ve yon bilgisi ile sinyal gucunu yorumlayip platformun duzlenmesi icin gerekli acilari hesaplayip motor kontrol Arduinosuna gonderir. Iletisim seri porttan yapilabilir.
Motor kontrolu icin ayri arduino bana gore sart. Eger platform step motorla calisacaksa ( ki su an bana baya mantikli gorunuyor ) step motorun yeterince hassas hareket etmesi icin yuksek mikrostep oraninda surulmesi gerek. yuksek mikrostep demek, cok daha kisa surede step pulse leri gondermek demek.
Seri iletisim Arduino icinde ayri bir donanimla yapildigindan islemci gucu yemiyor. yalnizca ramden data okumak kadar islem yeterli. Ancak motorlari IMU yu okuyan, sinyal gucunu olcen Arduino yapacak olursa, ornegin analog sinyal okurken yada Imu ile iletisim halinde iken step sinyallerini aksatir. Bu da motorlarin yumusak calismamasina ve neticede daha dengesiz bir platforma sebep olur.
Roller coaster simulatorumu yaparken butun bunlari yasadim zira

... Tertemiz bir sonuc icin, motor kontrolunun bagimsiz bir MCU ile yapilmasi gerek. Zaten 15 - 20 liralik seylerden bahsediyoruz
5 tane kullanilsa ne olur degil mi.
Bence ekstra agirlik baglamak isleri cok fazla kolaylastirmayacaktir. O agirligin faydali olmasi icin surtunmesi dusuk bir eklem yapmak lazim omnidirectional salinabilmeli. Bu eklemleri filan yapmak da epeyce ekstra malzeme katiyor. Ustelik salinima bagli olarak zamanla o agirlik da ivme kazanip platform hareketinde minik harmonikler yaratabilir.
Bu canagin temiz bir netice alabilmesi icin aci degisimlerine mumkun oldugunca hizli tepki vermeli. yani alttaki plaftormu kaydirdik, platform buna 200ms sonra tepki verirse bence surekli sinyal sorunu yasanir. Bu sebepten de maksimum hiz ve maksimum pozisyonlama kabiliyeti ve ekonomik olsun dersek; herseyin hafif olmasi en iyisi.
Ben zaten karbondan yapmayi onermistim. canak 1 metrekare olacak degil. 100 - 200 TL ye oldukca hafif ve rijit bir canak yapilabilir. dedigim gibi, aluminyum folyo sinyal yansitmaya yetecekse tabi.
Cam fiberden yapmaktansa, ise yariyorsa aluminyum canak bulmak bence daha mantikli. cam fiberden yapsaniz ortalama ozgul agirligi 1.5 - 2 arasi olacaktir. aluminyum 2.7 canagin ebatlari dusunulurse cam elyaftan yapmaya degmez. Karbondan yapmaya degebilir. aluminyuma gore %50 agirlik farki elde edilebilir. Karbon elektrik iletken bir malzeme. bu sebepten canakta nasil reaksiyon verir bilemem. Fiberglass radyo dalgalarina %100 transparan. yokmus gibi icinden gecip gidiyorlar.
Lnb korumalari da cikartilirsa zaten epey hafif olacaktir. icinde agir bir parca oldugunu dusunmuyorum.
Muhtemel agirliklar :
canak 500gr da bitirilebilirse super olur.
lnb govdesi atilirsa zannimca 200 gr yi gecmez.
Lnb tutucu kollar filan hazir fiber borulardan yapilabilir.
yatay hareket icin nema 17 kullanilsa motor ve baglantilari filan derken 1kg kadar onlar tutar. yatay eksen hareketi icin gerekli disli olarak da kayis kullanilabilir. bu durumda toplam platform ustu agirlik 2 kg civarinda olur.







